Actualización [ 6 ] | Comunicación de Dispositivos
· 2 min de lectura

All the Team
Comunicación
Raspberry Pi - Microcontrolador
Decidimos finalmente comunicar la Raspberry Pi y el Microcontrolador entre sí vía USB , este cambio -aunque drástico- es mucho más conveniente para nuestro proyecto, y de igual forma no cambiará demasiado al tener que vernos obligados a utilizar wifi para comunicar la Raspberry Pi con la App.
Quedando el gráfico tal que así:
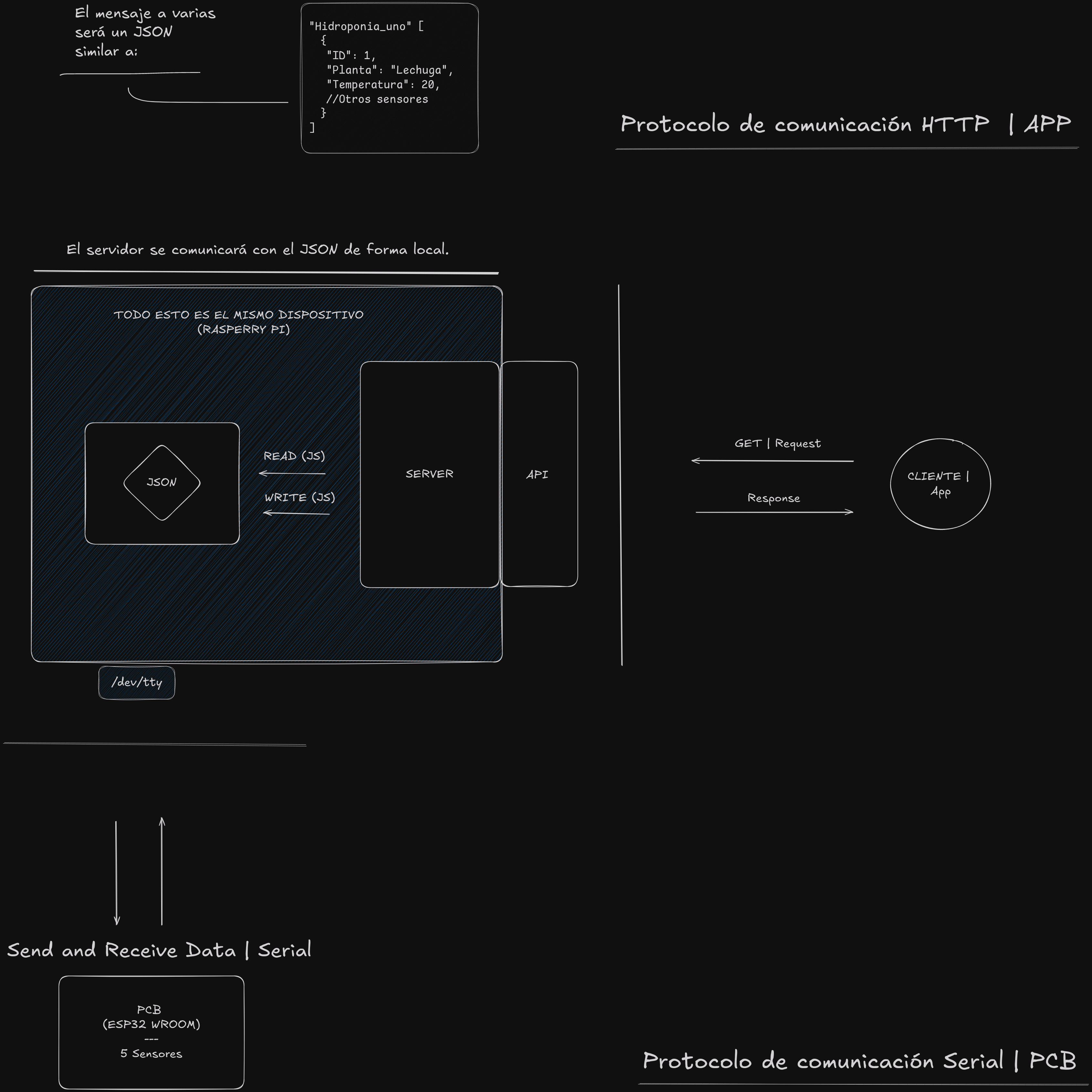
Nota: En aquel momento se pensaba utilizar el ESP WROOM, luego cambiamos al Arduino Nano al no necesitar del Wifi y, tener mayor acceso a la información de como programarlo.
Importante
Cuestión: Aquí viene lo importante:
- Logramos enviar correctamente los datos del microcontrolador a la Raspberry Pi por USB.
¿Cómo se logró esto?
Básicamente controlando el recibo de datos con Python y dependencias de éste, en este caso de Pyserial.
import serial
import time
ser = serial.Serial('/dev/ttyACM0', 115200, timeout=1.0)
time.sleep(3)
ser.reset_input_buffer()
print("Serial OK")
try:
while True:
time.sleep(0.01)
if ser.in_waiting > 0:
line = ser.readline().decode('utf-8').rstrip()
print(line)
except KeyboardInterrupt:
print("Close Serial Communication")
ser.close()
En resumidas cuentas el código hace lo siguiente:
- Se inicializan los modulos para manejar tiempos y datos seriales (Importante instalar pyserial) y luego se procede a generar un bucle el cual esperaría datos por un puerto USB. Siendo éste en concreto el puerto "/dev/tty/ACM0". Es el directorio donde se alojan los puertos en Raspbian (Linux).
- Luego hace más cosas como decodificar la información en UTF-8 (para mostrar el texto correctamente) pero no son de importancia.
- Ante una interrupción de teclado se detiene el script.
Luego el código en el microcontrolador es el siguiente:
#include <Arduino.h>
void setup(){
Serial.begin(115200);
while(!Serial) {}
}
void loop(){
Serial.println("Mensaje a Raspberry Pi");
Serial.write("Lol");
delay(1000);
}
Como ven el código es muy sencillo; los mismos print que se pueden mostrar en consola para debuguear código ya bastan para enviar datos. Lo importante aquí es el script de Python
Setup épico
